Multi-robot rendezvous in communication-restricted unknown environments via backtracking and semantic frontier-based exploration
Matteo Luperto, Mauro Tellaroli, Michele Antonazzi, Nicola Basilico
Matteo Luperto, Mauro Tellaroli, Michele Antonazzi, Nicola Basilico
The multi-robot rendezvous problem requires coordinating a team of mobile robots to converge at a common location. Efficient decentralized execution with limited communication and in unknown environments can be essential in several applications, but such real-world robotic features are often not captured by theoretical rendezvous frameworks. In this work, we present an approach to this problem that extends traditional frontier-based exploration strategies to facilitate efficient rendezvous in such conditions. Our method allows robots to backtrack their exploration of the environment and exploit semantic knowledge on the map by prioritizing high-connectivity areas like corridors and hallways. We define and evaluate different variants of our method to study a trade-off between the time taken to perform a rendezvous and the amount of discovered area in the environment. Extensive experimental evaluation in ROS using 3D simulations demonstrates the feasibility of our method and its performance improvements over baselines.
We consider the rendezvous problem for a team of autonomous mobile robots in the challenging setting of a communication-restricted and initially unknown indoor environment. We assume that the robots start from different arbitrary locations, but no map of the environment is available to any of them and no pre-determined meeting location or coordination strategy has been agreed upon. The communication in the environment is restricted to occur only after a rendezvous.
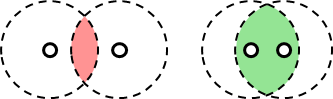
Minimum range constraint.
Line of sight.
The difficulty of the rendezvous problem is augmented by the fact that the MRS needs to simultaneously perform an online exploration task, as the environment is unknown. The widely used frontier-based exploration strategy is in contrast with what is required by an efficient rendezvous, which, in principle, does not strictly require building a complete map.
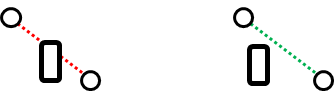
We propose an extension of the classical Frontier-Based Exploration (FBE) biased towards Rendezvous (hence the acronym FBR). Frontiers are created not only for their potential contribution to the map's expansion but also to increase the opportunity of meeting a teammate. To do so, we introduce an exploration trace with an information decay mechanism that allows each robot to forget about parts of the environment that have been explored and mapped, creating hallucinated frontiers. In this way, the robot is encouraged to backtrack on previously explored areas facilitating accidental rendezvous. When robot meet, they from a cluster merging their exploration trace and sharing the frontiers. When a new cluster is formed, the leader continue the exploration strategy with hallucinated frontiers, while the other members are followers. The rendezvous is completed when all robots are inside the same cluster.
A robot navigating with its exploration trace (in red). Frontiers for exploration and rendezvous (hallucinated) are in blue and green.
Frontier sharing when two robots join a cluster.
To further increase the chance to complete a rendezvous, we assume the robot is able to distinguish high-connectivity areas (such as hallways or corridors) of the environment from peripheric ones (like small rooms or offices). Assuming this capability, we propose an extension of the standard utility function used for frontier selection, in which frontiers in high-connectivity areas have increased importance.
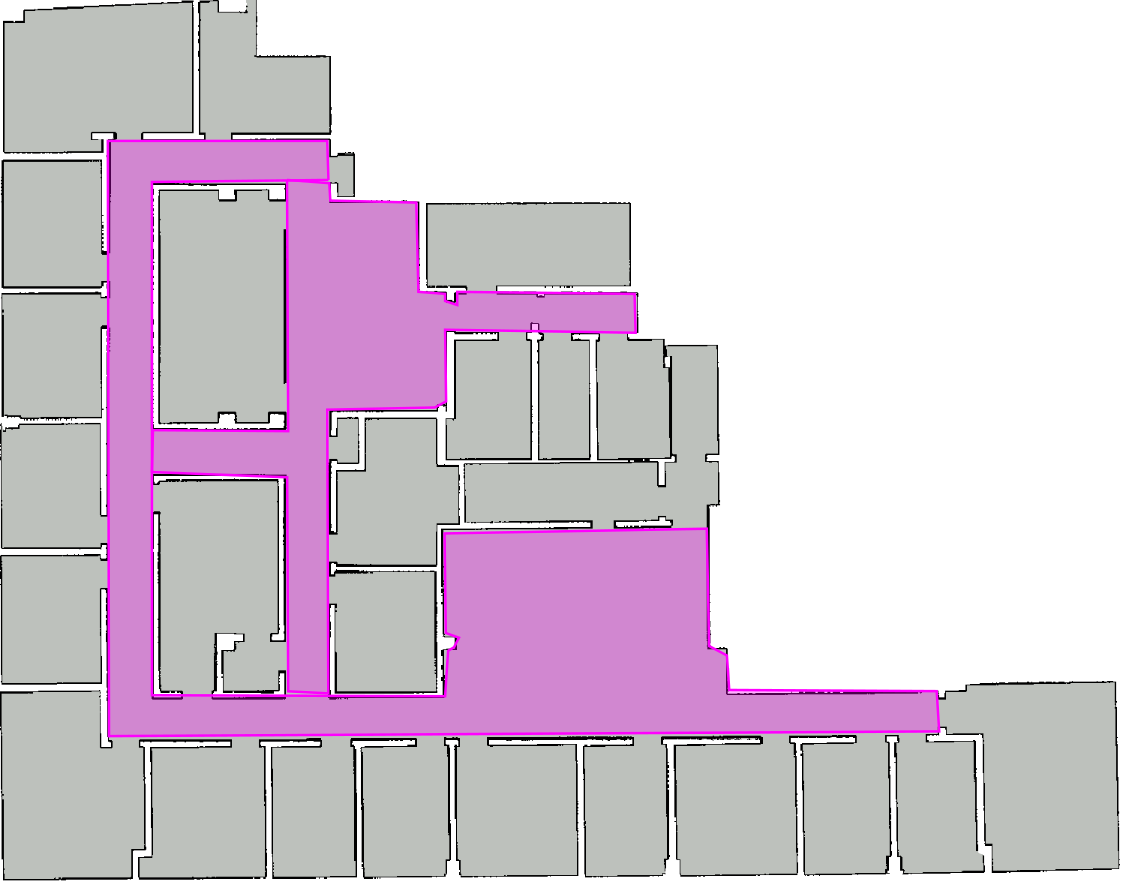
High-connectivity area (highlighted in pink).
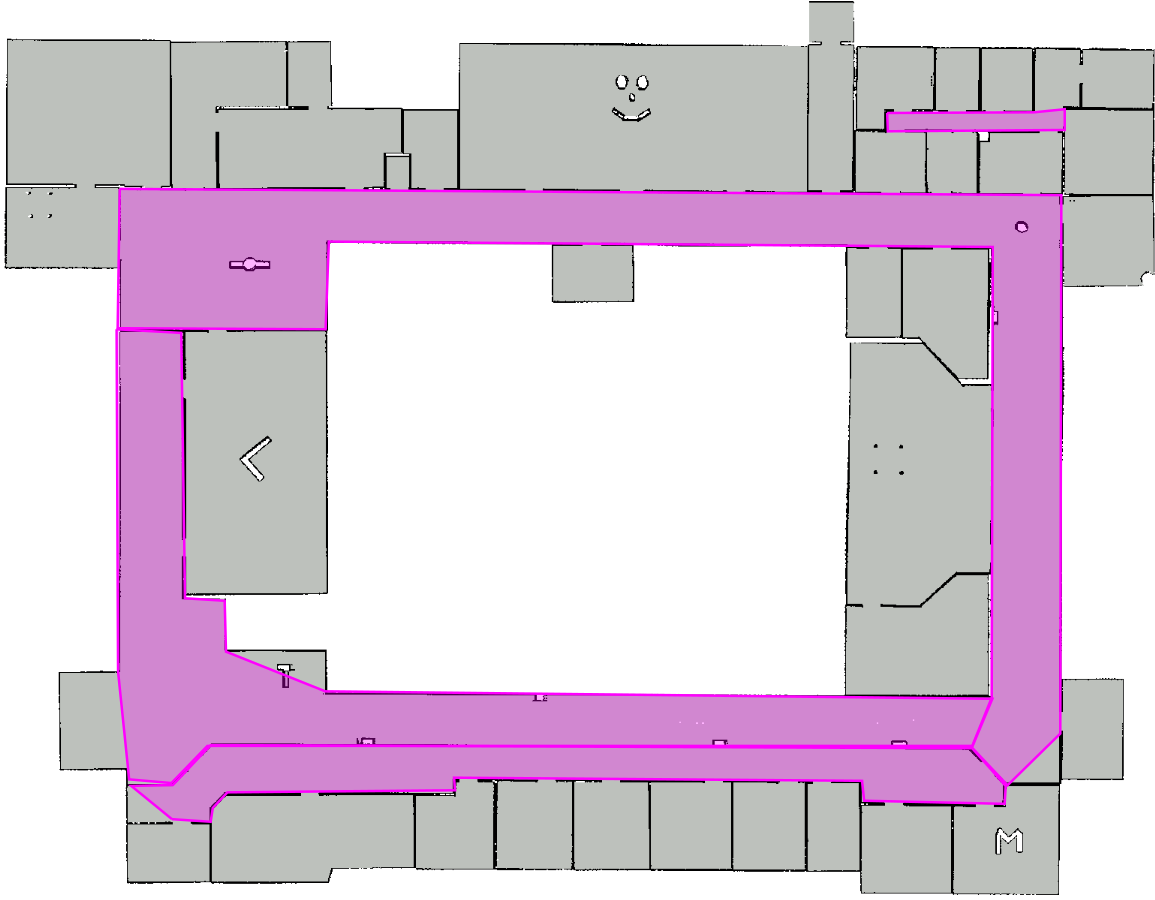
High-connectivity area (highlighted in pink).
We validate our approach with an extensive experimental campaign in realistic simulations. In our experiments, we perform real-time runs with a Turtlebot-3 burger exploring large environments simulated with Gazebo. The results demonstrate that our method encourages the robots to backtrack on previously-visited location, facilitating accidental rendezvous. More specifically, adding the backtracking to the standard frontier-based exploration increase the rendezvous of approx. 40%, an improvement that is also enhanced considering also the high-connectivity areas while choosing the next location.
Rendezvous paths obtained with our method with backtracking (FBE-BT - first row) and the baseline (FBE - second row) in a series of environments.
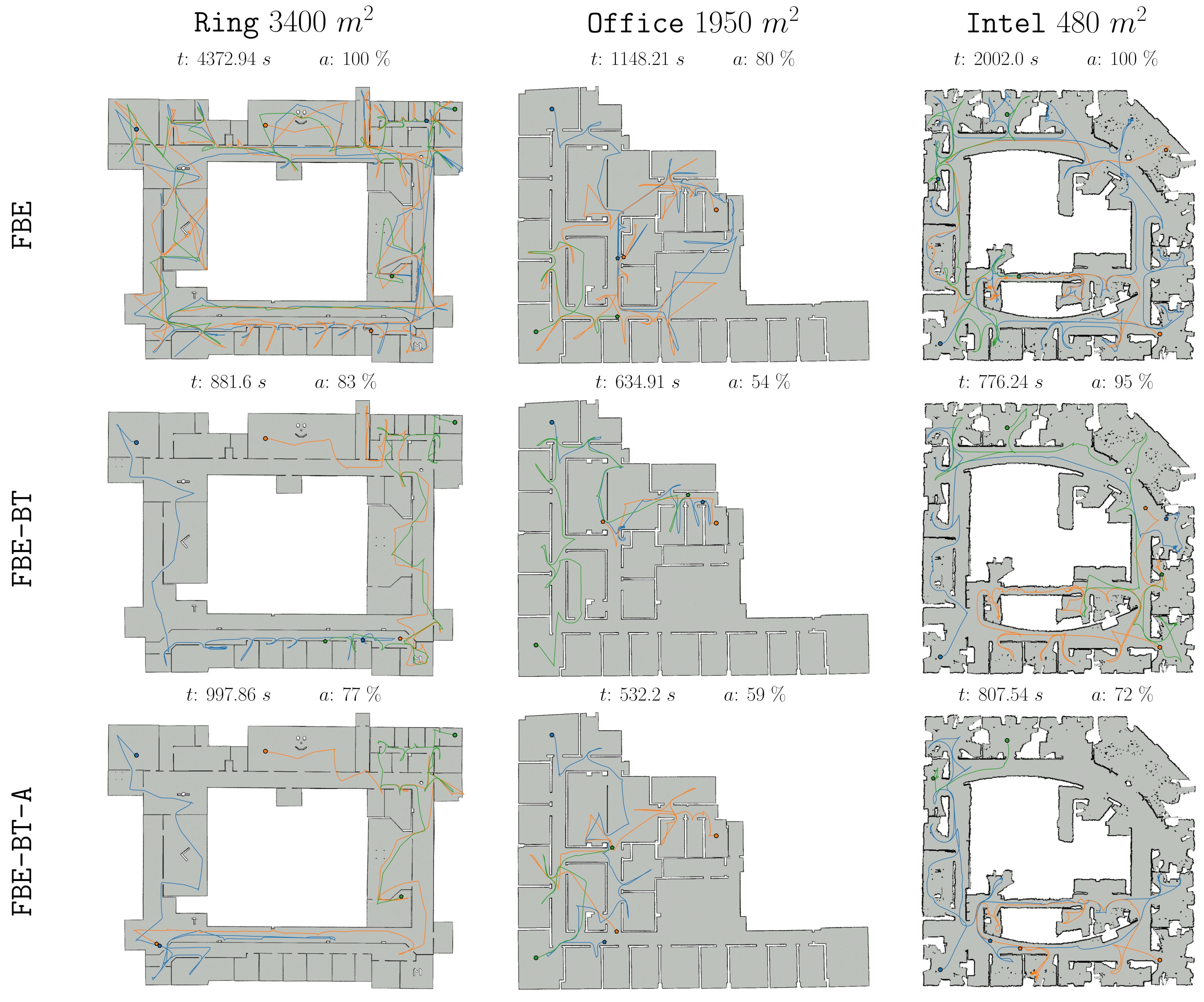
Comparison between the standard frontier-based exploration (FBE - first row), our method with backtracking (FBE-BT - middle row), and its extension considering high-connectivity area (FBE-BT-A - last row). The time to perfom the rendezvous and the area covered by the robots are labeled with t and a, respectively.
@article{LUPERTO2025105137,
title = {Multi-robot rendezvous in communication-restricted unknown environments via backtracking and semantic frontier-based exploration},
journal = {Robotics and Autonomous Systems},
pages = {105137},
year = {2025},
issn = {0921-8890},
doi = {https://doi.org/10.1016/j.robot.2025.105137},
url = {https://www.sciencedirect.com/science/article/pii/S0921889025002349},
author = {Matteo Luperto and Mauro Tellaroli and Michele Antonazzi and Nicola Basilico},
}
@INPROCEEDINGS{10801321,
author={Tellaroli, Mauro and Luperto, Matteo and Antonazzi, Michele and Basilico, Nicola},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={Frontier-Based Exploration for Multi-Robot Rendezvous in Communication-Restricted Unknown Environments},
year={2024},
volume={},
number={},
pages={5807-5812},
doi={10.1109/IROS58592.2024.10801321}
}